

Solutions
Industries
© Copyright 2026. All Rights Reserved.

Perception programs are bottlenecked by edge-case coverage and multi-sensor QA consistency. As fleets, cities and chains scale, holding calibration across reviewers and modalities is what keeps the model safe in production.
The rare scenarios that matter most for safety are the hardest to label consistently.
Camera, LiDAR and radar fusion demands QA that keeps modalities aligned.
Reviewer agreement drifts as programs scale across cities, fleets and chains.
3D point-cloud and camera-fusion labeling with multi-sensor QA.
Detection, segmentation and tracking to pixel and millimeter precision.
Targeted edge-case review where safety risk concentrates.
Imagery and map feature extraction at city and national scale.
Automated checks, expert adjudication and DS spot-audits.
One reviewer standard across fleets, cities and chains.
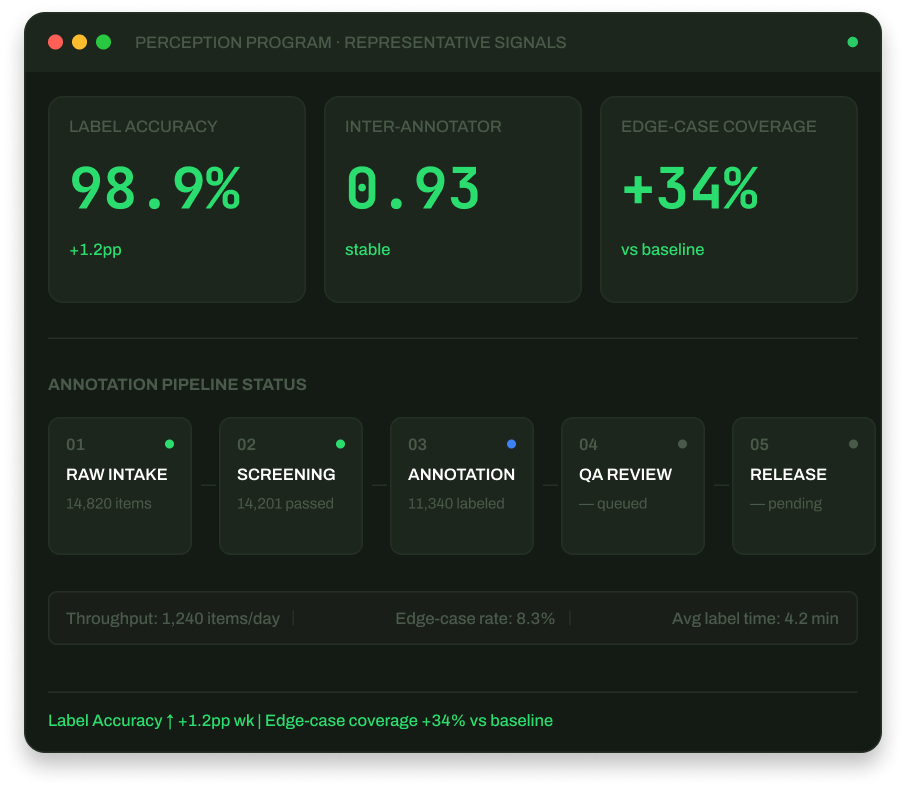
Targets we govern to and report on every program; engagement results are shared under NDA.
DS Orchestrator governs labeling accuracy and multi-sensor QA so perception data stays consistent as your program scales.
Bring an edge-case or multi-sensor workload where consistency slips. We will calibrate it and hand back a per-class quality report.
